Solution
Solution to the assignment.
lpspi0_master.c
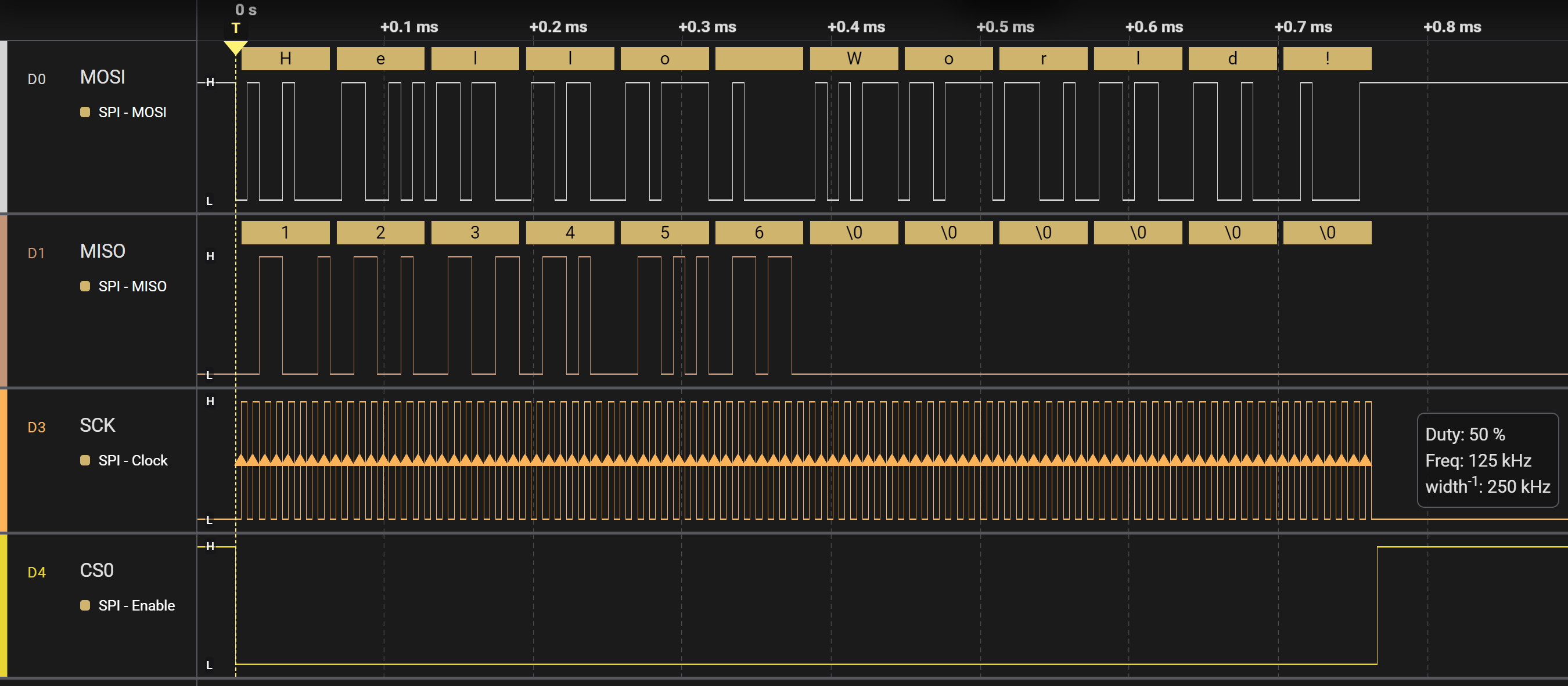
In the function lpspi0_master_tx() change the prescaler configuration to obtain a 125 kHz SCK.
// CPOL: [0] = Clock polarity inactive low
// CPHA: [0] = Clock polarity captured
// PRESCALE: [011] = Divide by 4
// PCS: [00] = Transfer using PCS[0]
// LSBF: [0] = MSB first
// BYSW: [0] = Disable byte swap
// CONT: [1] = Continuous transfer enabled. In Master mode, this field
// keeps PCS asserted at the end of the frame size until a
// command word is received that starts a new frame.
// CONTC: [0] = Command word for start of new transfer
// RXMSK: [0] = Normal transfer
// TXMSK: [0] = Normal transfer
// WIDTH: [00] = 1-bit transfer
// FRAMESZ: [000000000111] = Frame size = (7+1)
LPSPI0->TCR = LPSPI_TCR_PRESCALE(0b011) | LPSPI_TCR_CONT(1) | LPSPI_TCR_FRAMESZ(7);
main.c
int main(void)
{
lpspi1_slave_init();
lpspi0_master_init();
memset(lpspi0_tx_data, 0, N_DATA);
memset(lpspi1_tx_data, 0, N_DATA);
char *name = "Hello World!";
char *num = "123456";
uint32_t name_len = strlen(name);
uint32_t num_len = strlen(num);
memcpy(lpspi0_tx_data, name, name_len);
memcpy(lpspi1_tx_data, num, num_len);
while(1)
{
// Prepare receive buffers
memset(lpspi0_rx_data, 0, name_len);
memset(lpspi1_rx_data, 0, name_len);
// LPSPI1: Start receiving by using software FIFOs
lpspi1_slave_rx_start(lpspi1_tx_data, name_len);
// LPSPI0: transmit by using software FIFO
lpspi0_master_tx(lpspi0_tx_data, name_len);
// LPSPI1: read result from software FIFO
lpspi1_slave_rx_read(lpspi1_rx_data, name_len);
// LPSPI0: read result from software FIFO
lpspi0_master_rx_read(lpspi0_rx_data, name_len);
// Check the results
if(memcmp(lpspi0_tx_data, lpspi1_rx_data, name_len) != 0)
{
// Transmission error from LPSPI0 to LPSPI1
while(1)
{}
}
if(memcmp(lpspi1_tx_data, lpspi0_rx_data, name_len) != 0)
{
// Transmission error from LPSPI1 to LPSPI0
while(1)
{}
}
// Delay
for(uint32_t i=0; i<10000000; i++)
{}
}
}
Timing diagrams